|
I am a PhD student at the University of Washington advised by Byron Boots. I want to develop robots that can perform useful tasks by operating in complex environments with and without humans. I am interested in combining classical and learning based methods to develop efficient algorithms for robots so that they can leverage structure in the world and adapt to new scenarios from data and interaction. Before this I spent a (2 + 2i) (COVID :') years at the Indian Institute of Technology, Kanpur where I majored in Electrical Engineering. I was part of the Aerial Robotics team and that's how I started my tryst with Robotics. email | cv | google scholar | github | blog |

|
|
|
|
For the most up-to-date list of publications, please see google scholar.
|
Preprints |
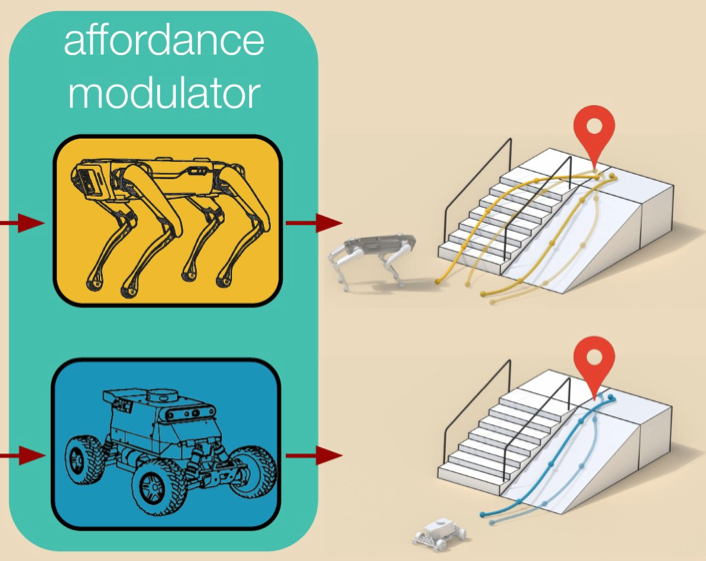 |
Mateo Guaman Castro, Sidharth Rajagopal, Daniel Gorbatov, Matthew Schmittle, Rohan Baijal, Octi Zhang, Rosario Scalise, Sidharth Talia, Emma Romig, Celso de Melo, Byron Boots, Abhishek Gupta, Submitted to International Conference on Robotics and Automation (ICRA) , 2026 Oral at the CoRL 2025 Workshop on Generalist Policies in the Wild and Robo-Arena Challenge paper website |
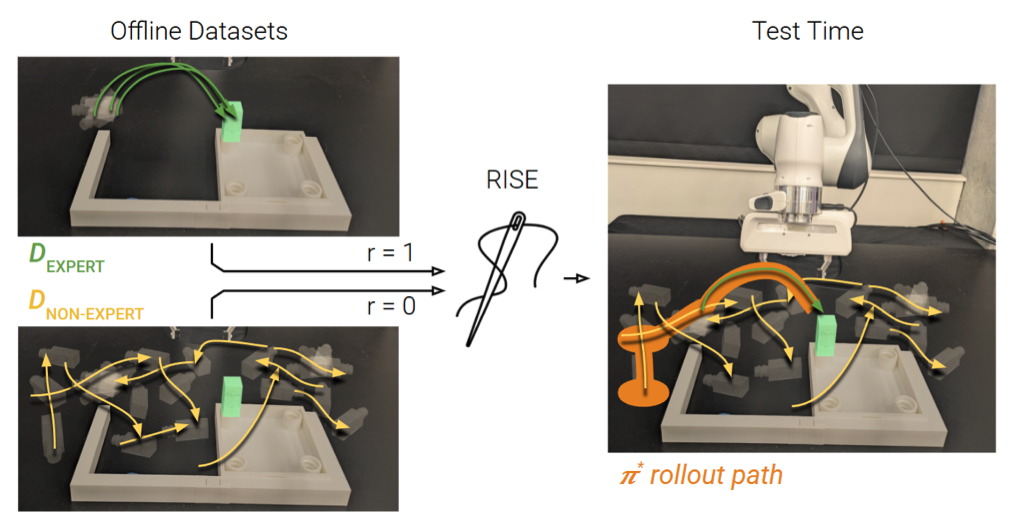 |
Kevin Huang, Rosario Scalise, Cleah Winston, Ayush Agrawal, Yunchu Zhang, Rohan Baijal, Markus Grotz, Byron Boots, Benjamin Burchfiel, Masha Itkina, Paarth Shah, Abhishek Gupta paper website |
Publications |
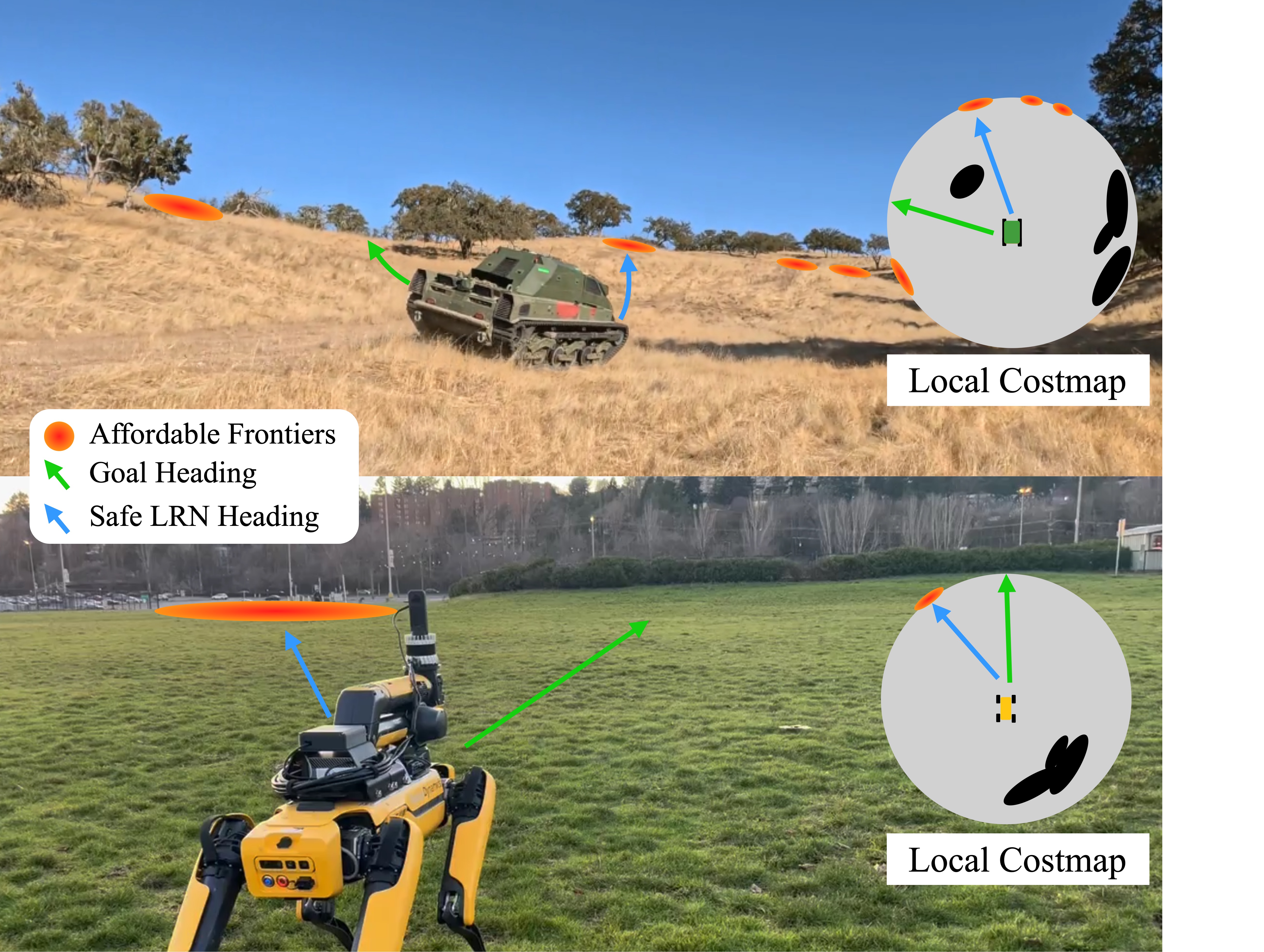 |
Matt Schmittle, Rohan Baijal, Nathan Hatch, Rosario Scalise, Mateo Guaman Castro, Sidharth Talia, Khimya Khetarpal, Siddhartha Srinivasa, Byron Boots Conference on Robot Learning (CoRL), 2025 Best Paper Award at ROAR Workshop at RSS 2025 paper website |
 |
Matt Schmittle, Rohan Baijal, Brian Hou, Siddhartha Srinivasa, Byron Boots International Conference on Robotics and Automation (ICRA), 2024 paper website |
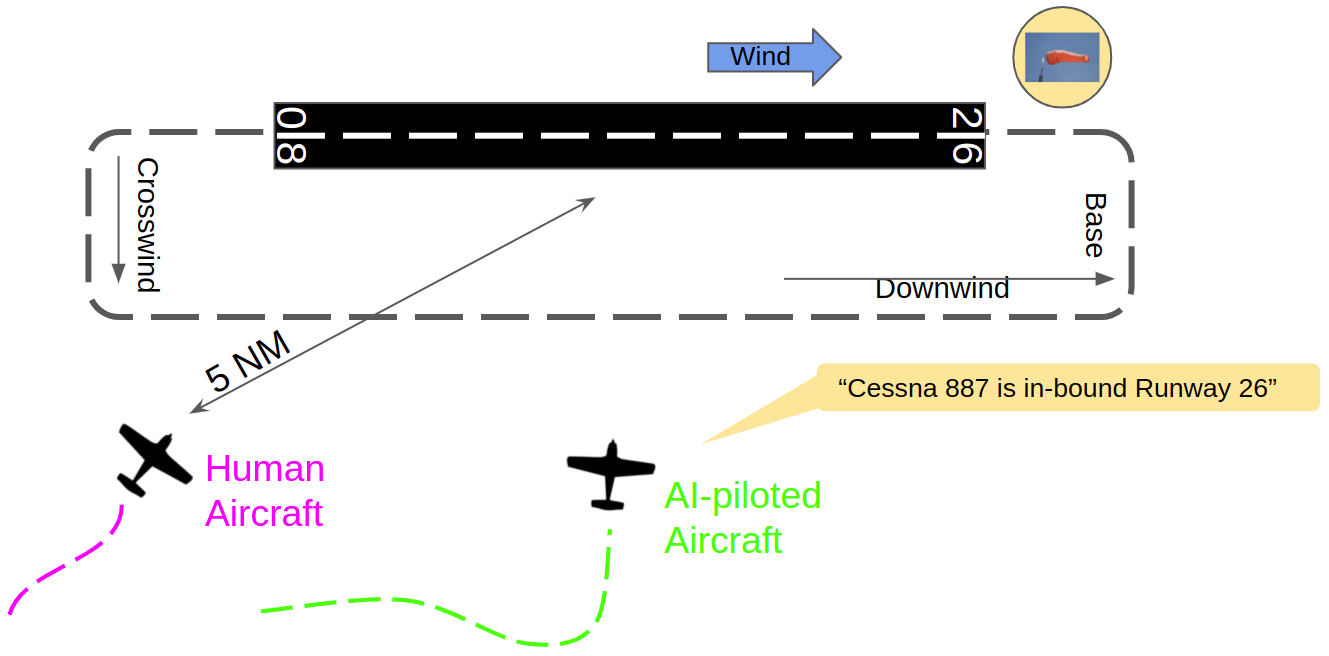 |
Jay Patrikar, Joao P. A. Dantas, Sourish Ghosh, Parv Kapoor, Ian Higgins, Jasmine J. Aloor, Ingrid Navarro, Jimin Sun, Ben Stoler, Milad Hamidi, Rohan Baijal, Brady Moon, Jean Oh, Sebastian Scherer Aerial Robotics Workshop at the International Conference on Robotics and Automation (ICRA), 2022 paper video |
Other interesting bits |
 |
Robotics community effort website |
 |
Robotics community effort website |
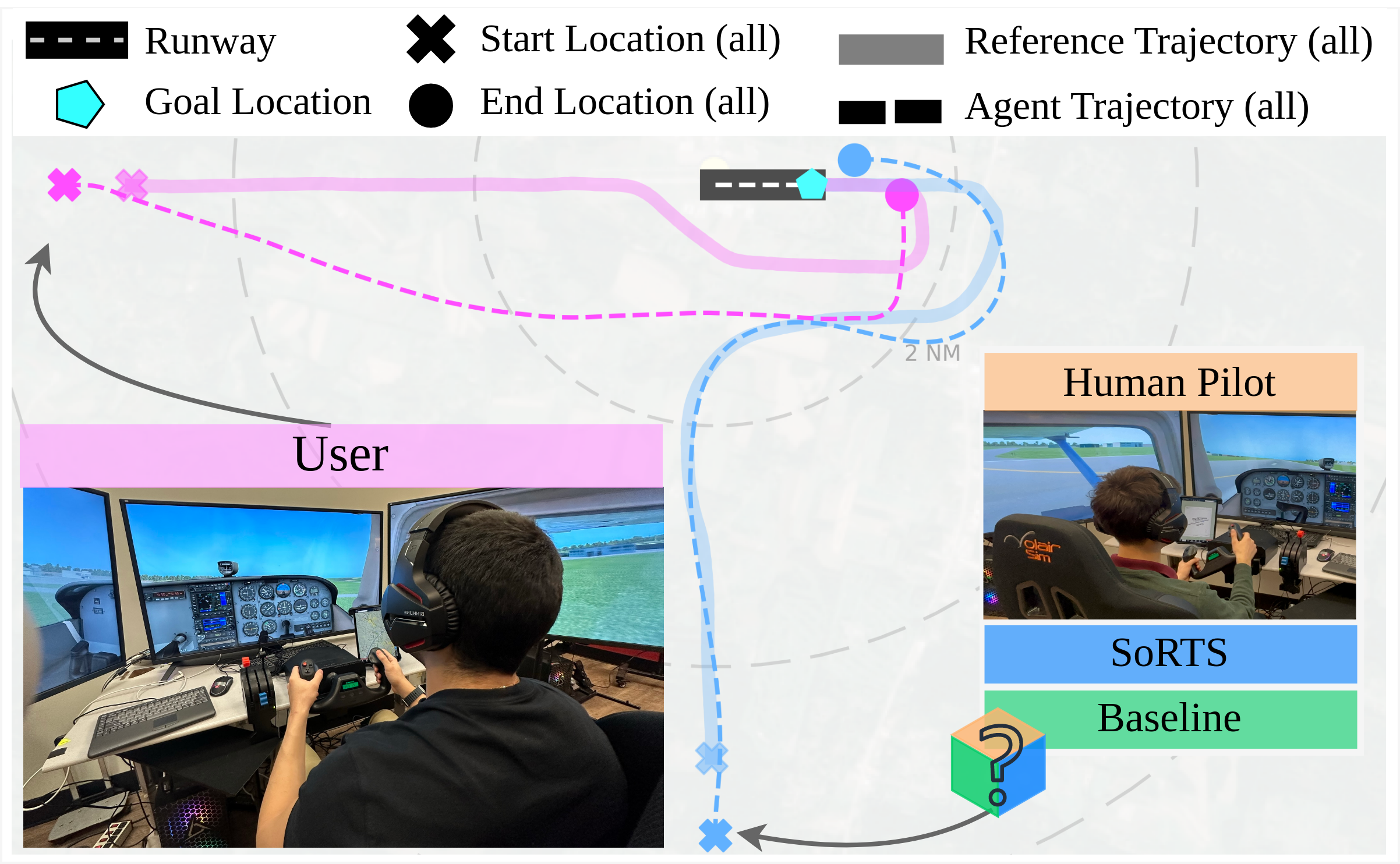 |
Ingrid Navarro, Jay Patrikar, Joao P. A. Dantas, Rohan Baijal, Ian Higgins, Sebastian Scherer, Jean Oh Preprint in Arxiv paper code video |
 |
Rohan Baijal, Jay Patrikar, Brady Moon, Sebastian Scherer, Jean Oh Robotics tools XPlaneROS blog AI Pilot blog code |
|
website adapted from here |